 README
¶
README
¶
OpenRMS
OpenRMS is an open platform for Slot car Race Management written in Go.
Motivation
The motivation for starting this project is, my experience getting into slot cars, and the software tooling around the hobby is for the most part closed source, and in many cases unmaintained, platform dependent.
The idea is to create an open source race management system capable of supporting multiple vendors such as Scalextric, Carrera or Oxigen.
Other than supporting as many vendors as possible, The community should be extend OpenRMS with the features need, it could be better support for Arduino, it could be having yellow flags light up around the track if a car has crash.
Last it must be platform independent, the goal is to be able to run it on a Raspberry Pi, eliminating the high entry price of a computer with a Windows license. The goal is to release a version that will work on both Mac OS, Linux and Windows
Help Needed
I'm no expert in frontend development, I would like to ask the community for any help with the frontend part of this project. Also if you have any comments, suggestions on new features or changes or you want to help extend openrms with support for other systems then Oxigen please let me know.
Getting Started
Running OpenRMS
To get it running start by downloading the version that matches your platform. Windows, Linux amd64 & arm (RapberryPi) is supported.
Windows
See detailed guide for windows here
Linux
Linux does not require any dependencies, all you need to do is identify your Oxigen
dongle device name. to find the oxigen device simply plugin the dongle and execute
dmesg in a terminal, note: on some systems this requires elevated privileges, if
that is the case run sudo dmesg instead.
look for the following 4 log lines:
[ 80.311293] usb 1-1: new full-speed USB device number 7 using xhci_hcd
[ 80.461950] usb 1-1: New USB device found, idVendor=1fee, idProduct=0002, bcdDevice=10.00
[ 80.461955] usb 1-1: New USB device strings: Mfr=0, Product=0, SerialNumber=0
[ 80.463802] cdc_acm 1-1:1.0: ttyACM0: USB ACM device
the last line in the output example shows the device name ttyACM0. write the name down and
edit the config.yaml file, find the implement section and change the port to
/dev/<devicename>.
implement:
plugin: oxigen
oxigen:
port: /dev/ttyACM0
now go to running OpenRMS.
Building
To build run make openrms
Running OpenRMS
When you have openrms build run ./openrms. if you have want to set
a path for the configuration file set the -config flag: ./openrms -config <file>
Configuration
Architecture
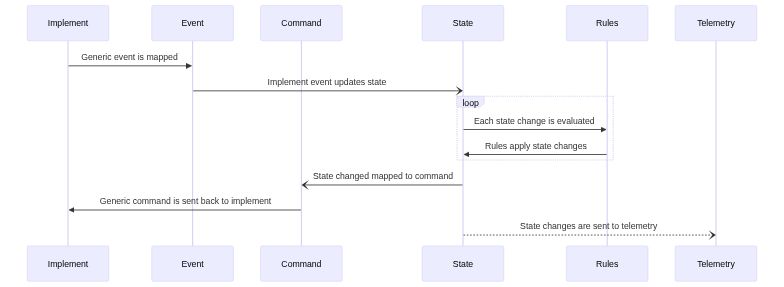
OpenRMS is build in a modular way, it's build around 3 different plugin types:
- Implement
- Rule
- Telemetry
Messages are passed around each component using either events coming
from the implement, and commands sent to the implement.
Rules are then applied to each event, and each change made by a rule is sent to the implement via a command. A rule can subscribe to individual changes, and make changes to the state.
The full sequence diagram can be seen below:
Implement
The implement is the connector, this plugin type provides connectivity between your hardware for example the Oxigen Dongle.
Rule
The rule is the definition of rules which are in effect during a race. for example fuel simulation
Telemetry
Optional plugin type which allows all metric collected to be shipped of to a database like InfluxDB
Extending
Roadmap
- Web interface
- GRPC or REST API with streaming data
- Fuel simulation
- Damage Simulation
- Race planning
- Better logging with configurable log levels
- Race management plugin support
- CLI
Contributing
When contributing to this repository, please first discuss the change you wish to make via issue, email, or any other method with the owners of this repository before making a change.
Please note we have a code of conduct, please follow it in all your interactions with the project.
Pull Request Process
- Ensure any install or build dependencies are removed before the end of the layer when doing a build.
- Update the README.md with details of changes to the interface, this includes new environment variables, exposed ports, useful file locations and container parameters.
- Increase the version numbers in any examples files and the README.md to the new version that this Pull Request would represent. The versioning scheme we use is SemVer.
- You may merge the Pull Request in once you have the sign-off of two other developers, or if you do not have permission to do that, you may request the second reviewer to merge it for you.
License
OpenRMS is licensed under the Apache License, Version 2.0. See LICENSE for the full license text.