 README
¶
README
¶
Dvizz - A Docker Swarm Visualizer

Inspired by the excellent ManoMarks/docker-swarm-visualizer, Dvizz provides an alternate way to render your Docker Swarm nodes, services and tasks using the D3 Force Layout.
Changes
2019-06-11
- Uses flaeg for command-line arg parsing
- Poll intervals can now be specified as program args.
2019-06-07
- Uses go modules
- Resolved dependency hell with Sirupsen vs sirupsen
- Uses gomock instead of testify mocks
- Folder structure according to idiomatic go project layout
- More use of structs with pointer receivers for better dependency injection etc.
- Rewritten Dockerfile, better caching of dependencies etc.
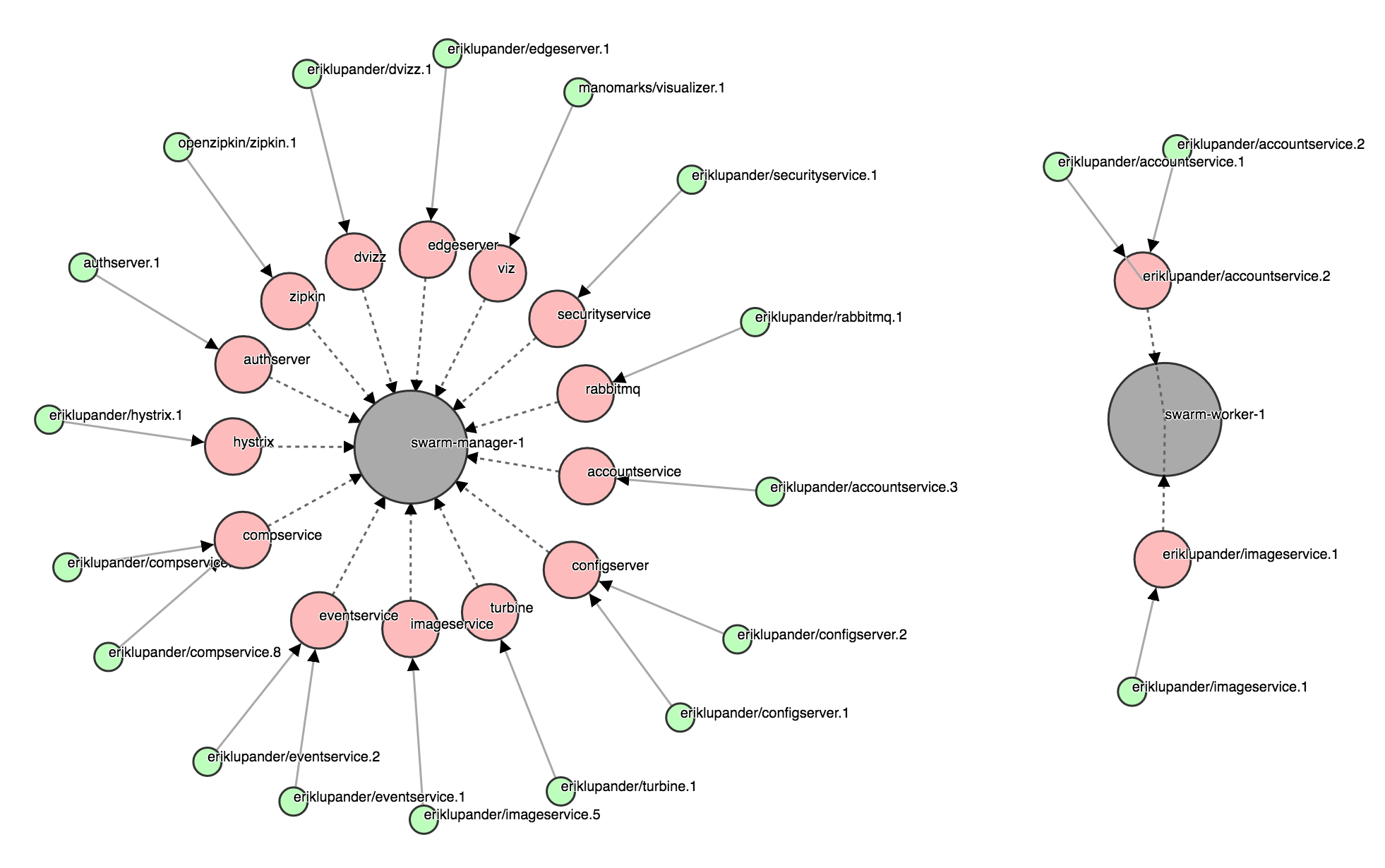
Legend:
- Big Gray circle: Docker Swarm Node
- Medium size red circle: Docker Swarm Service
- Small green circle: Docker Swarm Task
Task states
- Green: running
- Green with red border: preparing
- Gray: allocated
Why tasks and not containers?
There is an event stream one can subscribe to from the Docker Remote API that provides live updates of the state of services and containers. However, that stream only includes changes occurring on the same Swarm Node that is providing the docker.sock to the subscriber.
Since dvizz requires us to run on the Swarm Manager, using /events stream would effectively make us miss all events emitted from other nodes in the Swarm. Since queries for nodes, services and tasks over the docker.sock returns the global state (i.e. across the whole swarm) we're basing Dvizz on tasks rather than containers.
An option could be to create some kind of "dvizz agent" that would need to run on each node and subscribe to that nodes very own /events channel (given that the worker nodes actually supply that?) and then use some messaging mechanism to collect events to the "dvizz master" for propagation to the GUI.
Building locally
The Dvizz source code is of course hosted here on github. The Dvizz backend is written in Go so you'll need the Go SDK to build it yourself.
Clone the repository
git clone https://github.com/eriklupander/dvizz
Fetch external javascript libraries using Bower:
bower install
Build an linux/amd64 binary (on OS X, change "darwin" to "windows" or whatever if you're on another OS)
export GOOS=linux
export CGO_ENABLED=0
go build -o dvizz-linux-amd64 cmd/dvizz/main.go
export GOOS=darwin
Or use the Makefile:
make dvizz
The Dockerfile builds a docker image using multi-stage builds.
There is no need to install go and bower for building the docker image.
Running on Docker Swarm mode
Dvizz must be started in a Docker container running on a Swarm Manager node. I run it as a service using a docker service create command.
1.) Build locally (as described above) using the Dockerfile and specify a tag, for example someprefix/dvizz.
make build
2.) Run a docker service create command.
Note that you may need to remove or change the --network property to suit your Docker Swarm mode setup.
docker service create --constraint node.role==manager --replicas 1 \
--name dvizz -p 6969:6969 \
--mount type=bind,source=/var/run/docker.sock,target=/var/run/docker.sock \
--network my_network someprefix/dvizz
3.) Done. You should see dvizz when using docker service ls:
> docker service ls
ID NAME MODE REPLICAS IMAGE
3aoic5me90aj dvizz replicated 1/1 someprefix/dvizz
- Direct your browser to http://192.168.99.100:6969
(example running Docker Swarm locally with Docker Machine)
How does it work?
The heart is the Go-based backend that uses Go Dockerclient to poll the Docker Remote API every second or so over the /var/run/docker.sock. If the backend cannot access the docker.sock on startup it will panic which typically happens when one tries to (1) run Dvizz on localhost or (2) on a non Swarm Manager node.
The backend then keeps a diff of Swarm Nodes, Services and Tasks that's updated every second or so. Any new/removed tasks or state changes on running tasks are propagated to the web tier using plain ol' websockets.
In the frontend, the index.html page will perform an initial load using three distinct REST endpoints for /nodes, /services and /tasks. The retrieved data is then assembled into D3 nodes and links using the loaded data. Subsequent swarm changes are picked up from events coming in over the web socket, updating the D3 graph(s) and for state updates the SVG DOM element styling.
Known issues
- Paths rendered after inital startup are drawn on top of existing circles.
- Behaviour when new Swarm Nodes are started / stopped is somewhat buggy.
- D3 force layout seems to push new nodes off-screen. Swarm Nodes should have fixed positions?
- The styling is more or less ugly :)
TODOs
- Expand the functionality of the onclick listener. Currently, it just logs the node state to the console.
- Style, fix layout etc.
- Fix the line rendering. Either redraw the circles or use a custom line drawing that will "end" the line at the same offset as the r of the circle it connects to.
- Introduce state rendering for the Swarm Nodes, now they always looks the same regardless of actual state.
3rd party libraries
- jQuery (https://jquery.com/)
- d3js.org (https://d3js.org/)
- go-underscore (https://github.com/ahl5esoft/golang-underscore)
- go-dockerclient (https://github.com/fsouza/go-dockerclient)
- gorilla (https://github.com/gorilla/websocket)
- Underscore.js (http://underscorejs.org/)
License
MIT license, see LICENSE
 Directories
¶
Directories
¶
| Path | Synopsis |
|---|---|
|
dvizz
* The MIT License (MIT) Copyright (c) 2016 ErikL Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
|
* The MIT License (MIT) Copyright (c) 2016 ErikL Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software. |
|
internal
|
|
|
pkg/comms/mock_comms
Package mock_comms is a generated GoMock package.
|
Package mock_comms is a generated GoMock package. |
|
pkg/model
* The MIT License (MIT) Copyright (c) 2016 ErikL Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
|
* The MIT License (MIT) Copyright (c) 2016 ErikL Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software. |
|
pkg/service
* The MIT License (MIT) Copyright (c) 2016 ErikL Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
|
* The MIT License (MIT) Copyright (c) 2016 ErikL Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software. |